Robotic Tweezers
Background
UBC Studios is producing a series of 3D digital reconstructions of sample insects using photogrammetry. Photogrammetry is the process of using software to create 3D models of objects from hundreds of 2D images. This process can involve many stationary cameras or one camera moving around the object to capture all sides, and the background features need to be consistent in all images. However, it is difficult to stage insects in a way that exposes all sides, since the samples can’t be modified or damaged, and there is no distortion of surface features.
Objective
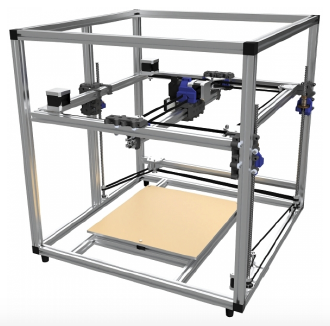
The objective of this ECE Capstone project was to provide a teleoperated robot to handle samples using force reduction techniques. The robot arm is expected to hold samples inside tweezers and hold the position while 3D scanning is in progress. The arm will be mounted on a gantry by UBC Studios to provide a large dextrous workspace.

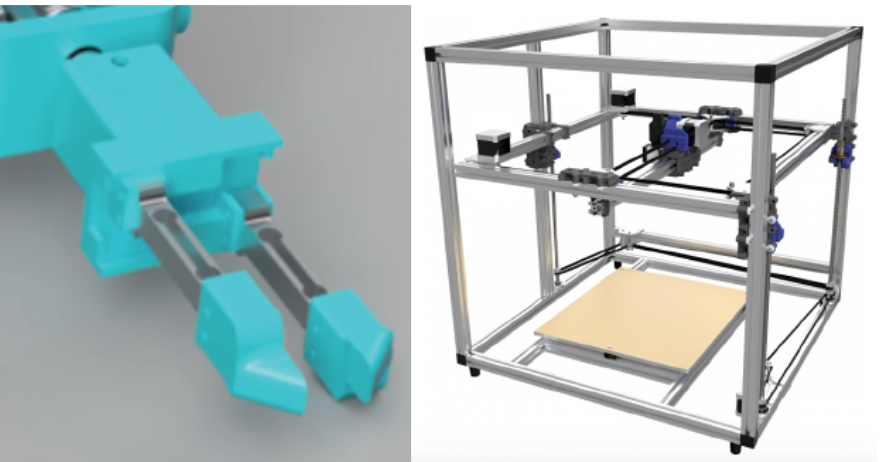
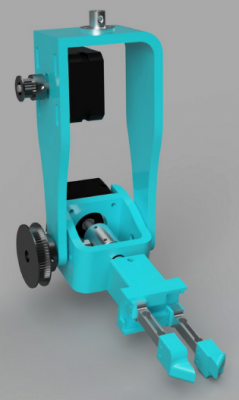
Design: End-Effector

This is controlled by a geared DC brushed motor. The sensing uses parallel dual load-cells with resolution of 0.025 grams.
The Team
Faculty Advisor
- Dr. Sid Fels, Professor of Electrical and Computer Engineering
UBC Studios Advisor
- Michal Suchanek
ECE Capstone Team
- Tyler Keeling (September 2021 – April 2022)
- Jake Cronin (September 2021 – April 2022)
- Alex Vazquez (September 2021 – April 2022)
- Robert Zokol (September 2021 – April 2022)
Design: Human Interface

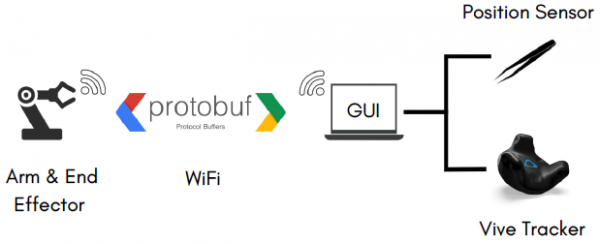
Force feedback comes from geared DC motor, and the Vive Tracker sends the orientation data. The switch is held to lock arm position in place and prevent unintended movement. The GUI changes parameters on the fly (force limit, rotation gain).
Design: Communication
Results
The ECE Capstone student team were able to successfully map the orientation of the Vive Tracker to joint states using Kinematic analysis, with the latency being less than 500 microseconds (0.5 ms). The force feedback resolution of 10mg was magnified by a configurable parameter. Wireless communications were used for ease, and modular tweezers for handling different specimens.
Next Steps
Further testing of force feedback controls is required. The tweezer end effectors may be hot-swapped to improve gripping of various objects. The robot arm will be mounted to XYZ gantry, and human interface functionality will be expanded to control XYZ translation.